一轉眼,波士頓動力 Atlas 機器人又會過獨木橋了!
波士頓動力的 Atlas 機器人會過獨木橋了!
過獨木橋,踩亂磚塊,走貓步,這是波士頓動力的 Atlas 機器人很新學會的能力!在美國人類與機器認知研究所(IHMC)新算法的支持下,Atlas完成了“最難行走實驗”,成功走過了亂石塊、獨木橋式的狹窄通道等復雜地形。
波士頓動力的 Atlas 機器人會過獨木橋了!
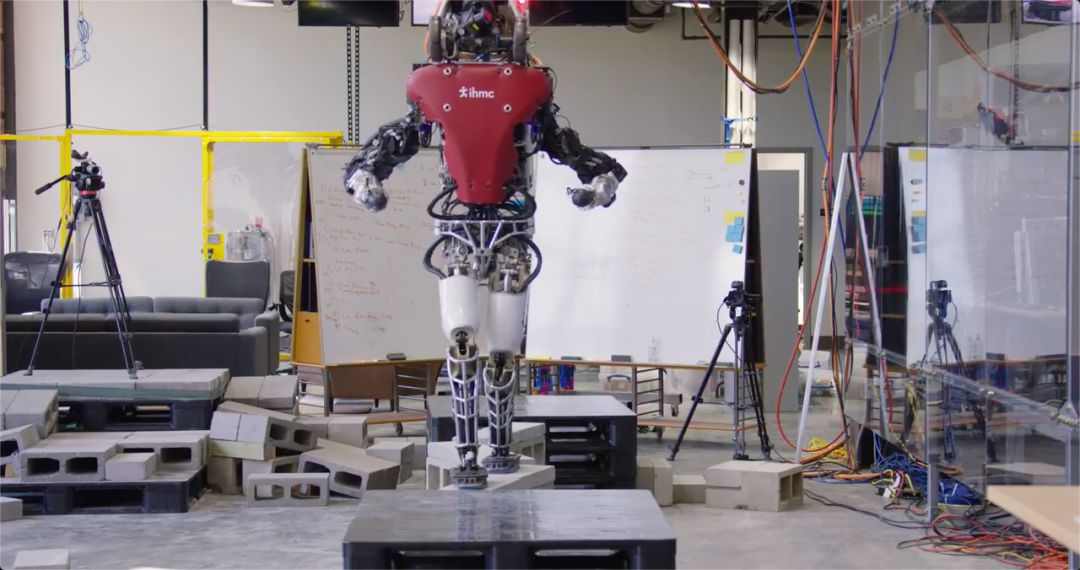
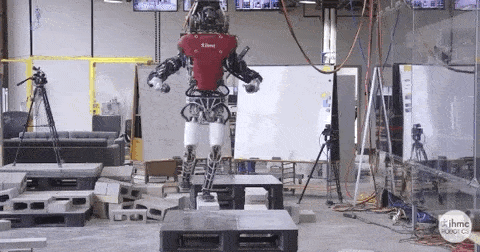
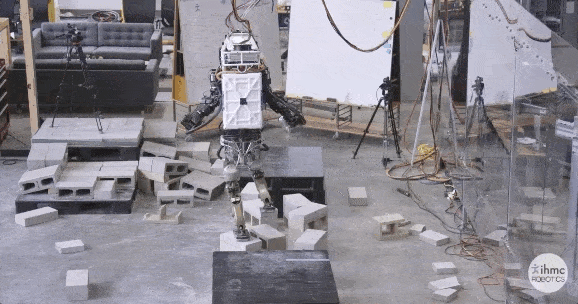
近日,IHMC Robotics 發布了一段相當震撼的新視頻,視頻中,波士頓動力的 Atlas 機器人 (DRC 版本) 在小心翼翼地、自主地走過各種物體,包括懸空的木板和搖晃的磚塊。
在搖晃的磚塊上走
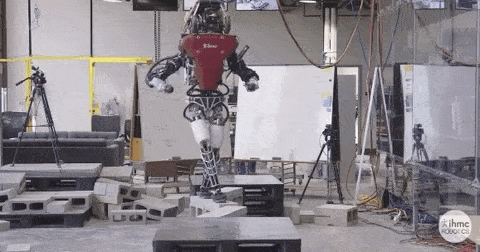
走獨木橋也不在話下
磚塊看起來搖搖晃晃,木板橋的寬度比它自己的腳看起來寬不了多少,Atlas 要走模特兒一般的 “貓步”,難度還是不小的。
Atlas 機器人由波士頓動力公司制造,但 IHMC Robotics 編寫了控制、感知和規劃算法,使機器人具備了視頻中展示的靈活性。
DRC(DARPA 機器人挑戰賽) 版的 Atlas 機器人使用系繩作為外部驅動,理由是:大型機器人容易大量耗電,而且系繩也有安全帶的作用,可以防止機器人在測試時摔到地面。DRC 參賽機器人都在其內部安裝有很重的電池包,這對于保持行走平衡來說是一大不利因素。
Atlas 機器人高約 1.83 米,重約 149~181 千克,全身有多達 28 個液壓關節,其原型是 PETMAN 機器人。
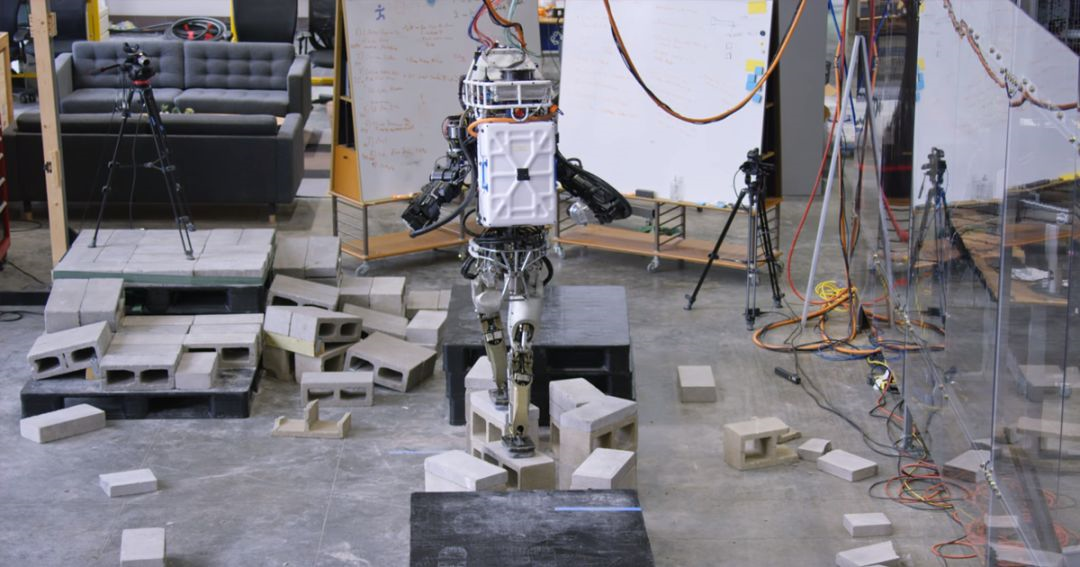
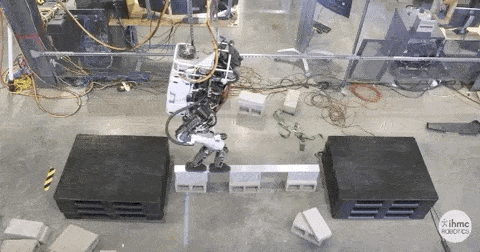
磚塊的寬度與機器人腳板寬度差不多
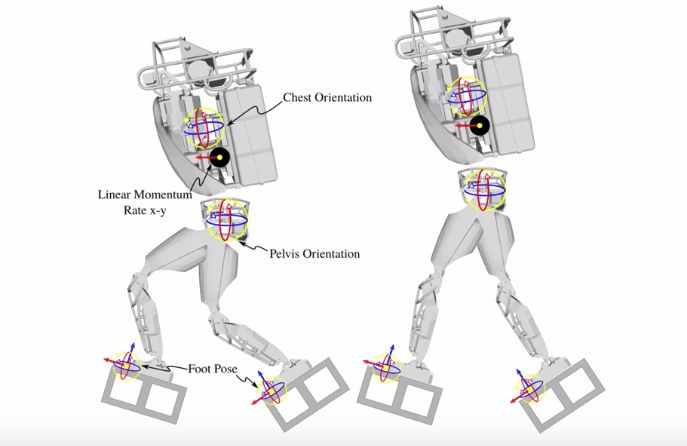
IHMC 稱,機器人利用激光雷達感知地形,并繪制平面區域的地圖。路徑規劃算法將平面區域中機器人的足跡規劃到由操作員制定的目標位置。
目前,機器人在這種地形上走路的成功率約為 50%。
IHMC 的研究人員計劃通過使用角動量增加平衡,并更好地考慮關節的運動范圍來提高成功率。
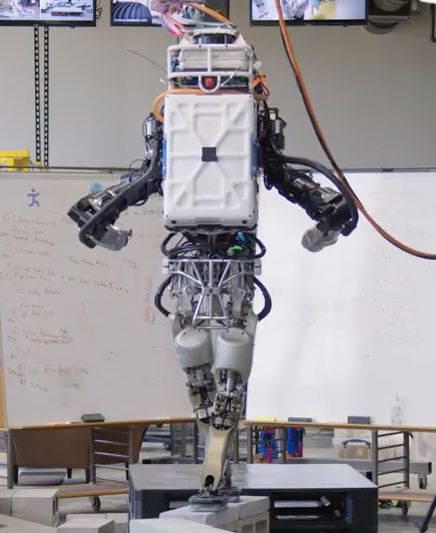
“交叉步”使機器人結構不太穩定
機器人在狹窄的地形上行走是很困難的,因為有時候要走 “交叉步”,由于機器人髖關節的運動范圍有限,并且當一只腳跨到另一只腳的正前方時會造成一個小的多邊形支撐,導致結構不穩定。
IHMC 全稱佛羅里達人類與機器認知研究所,是佛羅里達州立大學系統的非營利性研究機構。IHMC 的研究領域包括:人形機器人、雙足機器人控制技術、生物啟發的腿式機器人、人機系統設計、可穿戴式外骨骼設備等。
2015 年,IHMC Robotics 在 DARPA 機器人挑戰賽 (DRC) 獲得第二名的好成績,抱回100 萬美元獎金,使用的是波士頓動力公司提供的 Atlas 硬件。
之后,IHMC 繼續對 Atlas 機器人進行編程升級,希望教它 “像人類一樣走路”,獲得靈活性和控制能力。

機器人使用吸塵器有模有樣
靈活性例如 —— 做家務。他們公開的視頻展示了機器人掃地、使用吸塵器清潔地板、搬動、整理倉庫中的工具,將瓶瓶罐罐放進垃圾桶等。
不過,視頻是以 20 倍速播放的,實際的話 Atlas 的運行速度要慢得多,要在每一步停下來,思考和等待命令,然后執行每個任務的程序。
讓機器人直腿走路
人形機器人有著非常獨特的走路方式。他們的膝蓋彎曲,軀干盡可能保持不動,波士頓動力的 Atlas 機器人也采用這種蹲伏式的走路方式,因為腿保持彎曲狀態可以防止跌倒。
讓我們看一下Atlas是怎樣走的:
這種步態在人形機器人中非常常見,甚至已經成為機器人的 “正常” 步態。
但人類不是這樣走路的。我們走路時腿會有直著的時候,每一步都鎖住膝蓋,因為這樣可以更好地支撐我們的重量。你可以自己試一試,學機器人那樣一直彎曲著雙腿走路會很累。
IHMC 的機器人專家們試圖通過教 Altas 像人類一樣走路來解決這個問題。除了提高類人機器人的效率外,更自然的步態還能讓它們變得更加靈活,能夠應對更多崎嶇的地形。
為此,IHMC 開發了一種新的全身控制框架,驅動控制器使機器人的腿伸直,而不需要腿對地面施加更多的力。
從背后看,可以明顯看到機器人膝蓋有彎曲和直立的動作,步態更像人類
在實際的測試中,Atlas 能夠在各種地形上行走,甚至能夠在腿挺直的情況下對輕度的攻擊做出反應。
圖文來源:新智元
版權歸原作者所有,如有侵權,請聯系刪除

 津公網安備12010102000945號
津公網安備12010102000945號